
TADAです。
まずはJAPAN-OPEN2016の報告をしたいのですが、先にこちらをUPします。

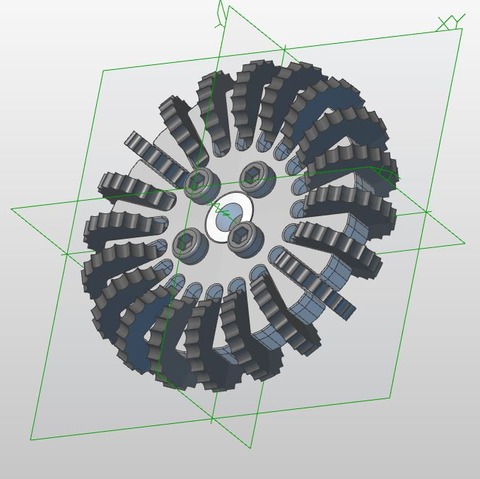
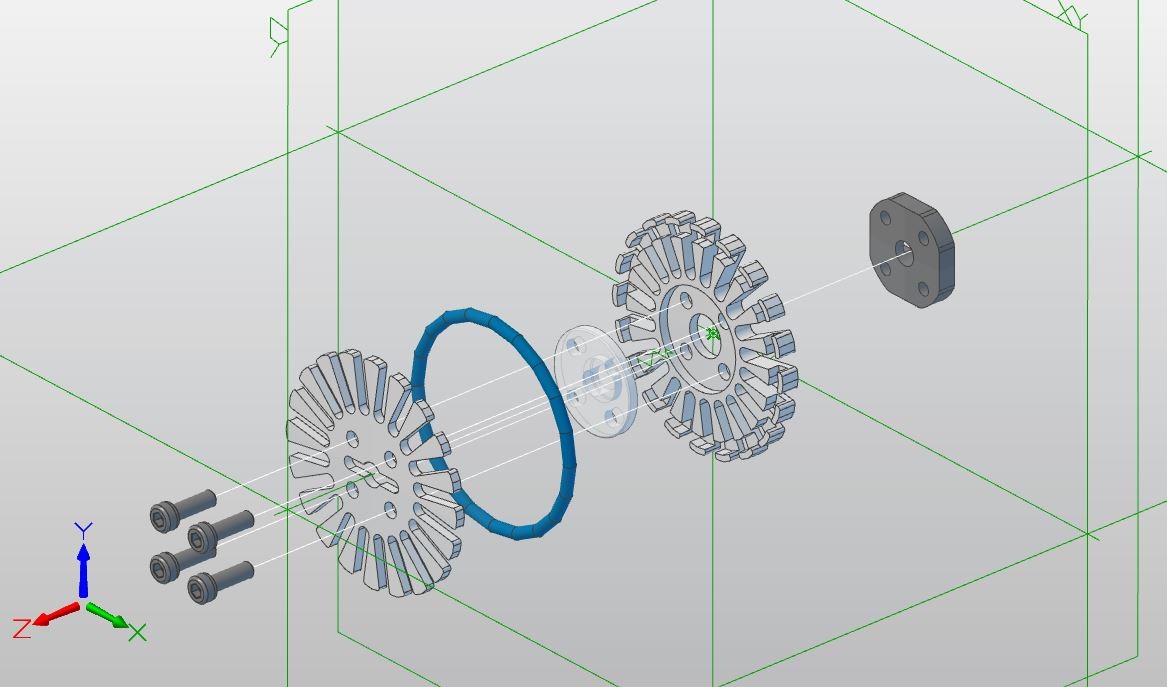
3D-CADの分解図です。
サイドホイール20個は省略してあります。青いリングはサイドホイールの軸を示しています。実際にはリングではなく、ピン単体が20個入っているので、それらを溝に埋め込んでリング化します。
厚さ3mmのメインフレームは、樹脂パーツを変更することで、違う軸径にも対応できるように設計されています。ダイセン専用に4Φを空けておいても良かったのですが、もし今後6Φ等に対応させるときに、少ない追加工で済むようにしてあります。
ダイセンさんのロボサイトモーター付属のピンを潰してしまわないように、0.5mm締め付けたところでリミットがかかる設計になっている、と説明しましたが、Ver.0のフレーム(表に溝が入っている)をそのまま使用したため、β版にはその機能はありません。すみません。
表に溝を出したくない場合は、ボルト-ナットに挟まれる部分を反転させてやると、ナットの裏に溝が隠れます。
逆さにした場合のイメージです。
表に樹脂パーツの一部が見えます。
とりあえず以上です。
指がもう少しよくなったら、また追加情報を載せます。
せとうちまでにいくつ用意できるかなぁ…。
まずはJAPAN-OPEN2016の報告をしたいのですが、先にこちらをUPします。
3D-CADの分解図です。
サイドホイール20個は省略してあります。青いリングはサイドホイールの軸を示しています。実際にはリングではなく、ピン単体が20個入っているので、それらを溝に埋め込んでリング化します。
厚さ3mmのメインフレームは、樹脂パーツを変更することで、違う軸径にも対応できるように設計されています。ダイセン専用に4Φを空けておいても良かったのですが、もし今後6Φ等に対応させるときに、少ない追加工で済むようにしてあります。
ダイセンさんのロボサイトモーター付属のピンを潰してしまわないように、0.5mm締め付けたところでリミットがかかる設計になっている、と説明しましたが、Ver.0のフレーム(表に溝が入っている)をそのまま使用したため、β版にはその機能はありません。すみません。
表に溝を出したくない場合は、ボルト-ナットに挟まれる部分を反転させてやると、ナットの裏に溝が隠れます。

逆さにした場合のイメージです。
表に樹脂パーツの一部が見えます。
とりあえず以上です。
指がもう少しよくなったら、また追加情報を載せます。
せとうちまでにいくつ用意できるかなぁ…。

コメント